2012-10-11
能用,速度很慢,仅供参考。
基本原理用一句话概括就是,“对共线的各点而言,从图像左上角到此直线的距离相等。”
//------------------------------------------------
//2012-10-11 blueblood7 初创。
//------------------------------------------------
const float PI = 3.141593;
const float PI_HALF = PI / 2;
#define CAST_0_255(x) ((x) < 0 ? 0 : ((x) > 255 ? 255 : (x)))
//使用 Sobel 算子。参考http://zh.wikipedia.org/wiki/Sobel算子
void EdgeDetect(const BYTE* pbyImageData, int nWidth, int nHeight, BYTE* pbyResult)
{
const int SOBEL_KERNEL_HOR[] = {-1,0,1,-2,0,2,-1,0,1};
const int SOBEL_KERNEL_VER[] = {-1,-2,-1,0,0,0,1,2,1};
const int SOBEL_KERNEL_WIDTH = 3;
const int SOBEL_KERNEL_HEIGHT = 3;
const int SOBEL_KERNEL_WIDTH_HALF = SOBEL_KERNEL_WIDTH >> 1;
const int SOBEL_KERNEL_HEIGHT_HALF = SOBEL_KERNEL_HEIGHT >> 1;
int nImageSize = nWidth * nHeight;
int i,j;
for (i=0; i<nHeight; i++)
for (j=0; j<nWidth; j++)
{
int k,l, nSumHor = 0, nSumVer = 0, nKernelIdx = 0;
for (k=0; k<SOBEL_KERNEL_HEIGHT; k++)
for (l=0; l<SOBEL_KERNEL_WIDTH; l++, nKernelIdx++)
{
int x = j + (SOBEL_KERNEL_WIDTH_HALF - l);
int y = i + (SOBEL_KERNEL_HEIGHT_HALF - k);
if (x < 0)
x = 0;
else if (x >= nWidth)
x = nWidth - 1;
if (y < 0)
y = 0;
else if (y >= nHeight)
y = nHeight - 1;
int nImageIdx = y * nWidth + x;
nSumHor += (SOBEL_KERNEL_HOR[nKernelIdx] * pbyImageData[nImageIdx]);
nSumVer += (SOBEL_KERNEL_VER[nKernelIdx] * pbyImageData[nImageIdx]);
}
int nEdgeVal = int(sqrt(float(nSumHor * nSumHor + nSumVer * nSumVer)));
pbyResult[i*nWidth + j] = CAST_0_255(nEdgeVal);
}
}
//参考http://zh.wikipedia.org/zh-cn/大津算法
int Ostu(BYTE* pbyImageData, int nImageSize)
{
int* pnForegroundCount = new int[256];
int* pnBackgroundCount = new int[256];
int* pnForegroundSum = new int[256];
int* pnBackgroundSum = new int[256];
memset(pnForegroundCount, 0, 256 * sizeof(int));
memset(pnBackgroundCount, 0, 256 * sizeof(int));
memset(pnForegroundSum, 0, 256 * sizeof(int));
memset(pnBackgroundSum, 0, 256 * sizeof(int));
int i;
for (i=0; i<nImageSize; i++)
{
int nVal = pbyImageData[i];
int j;
//j是阈值
//灰度值大于等于阈值时,该像素被作为前景。
for (j=0; j<=nVal; j++)
{
pnForegroundCount[j] ++;
pnForegroundSum[j] += nVal;
}
//灰度值小于阈值时,该像素被作为背景。
for (; j<256; j++)
{
pnBackgroundCount[j] ++;
pnBackgroundSum[j] += nVal;
}
}
float fGMax = -1.0f;
int nThreshold = -1;
for (i=0; i<256; i++)
{
float fForegroundRate = pnForegroundCount[i] / (float)nImageSize;
float fBackgroundRate = pnBackgroundCount[i] / (float)nImageSize;
float fForegroundMean = pnForegroundSum[i] / (float)pnForegroundCount[i];
float fBackgroundMean = pnBackgroundSum[i] / (float)pnBackgroundCount[i];
float fG = fForegroundRate * fBackgroundRate * (fForegroundMean - fBackgroundMean) * (fForegroundMean - fBackgroundMean);
if (fG > fGMax)
{
fGMax = fG;
nThreshold = i;
}
}
delete[] pnForegroundCount;
delete[] pnBackgroundCount;
delete[] pnForegroundSum;
delete[] pnBackgroundSum;
return nThreshold;
}
void ImageThresholding(BYTE* pbyImageData, int nImageSize, int nThreshold)
{
int i;
for (i=0; i<nImageSize; i++)
{
if (pbyImageData[i] >= nThreshold)
pbyImageData[i] = 255;
else
pbyImageData[i] = 0;
}
}
#define IS_ZERO(x) (((x) < 0.000001 && (x) > -0.000001) ? TRUE : FALSE)
#define IS_IN_DIFF_RANGE(x) (((x) < 1.000001f && (x) > -1.000001f) ? TRUE : FALSE)
//对给定的一组数据M,按值,把相同的分成一组,共N组,N<=M。
//pnElementCountPerGroup、pnElementPermutation、pfGroupVal 由调用者分配内存,大小是 nValCount。
//比如输入数据 pfVal = {0.12, 0.08, 0.12, 0.15, 0.7, 0.08, 0.12, 0.7, 0.08}, nValCount = 9。
//输出是 nGroupCount = 4。
// pnElementCountPerGroup = {3, 3, 1, 2}。
// pnElementPermutation = {0, 2, 6, 1, 5, 8, 3, 4, 7}。
// pfGroupVal = {0.12, 0.08, 0.15, 0.7}。
void CalcGroup(float* pfVal, int nValCount, int& nGroupCount, int* pnElementCountPerGroup, int* pnElementPermutation, float* pfGroupVal)
{
nGroupCount = 0;
memset(pnElementCountPerGroup, 0, nValCount * sizeof(int));
memset(pfGroupVal, 0, nValCount * sizeof(float));
BOOL* pProcessed = new BOOL[nValCount];
int i;
for (i=0; i<nValCount; i++)
pProcessed[i] = FALSE;
int nGroupIdx = 0;
int nPermutationIdx = 0;
for (i=0; i<nValCount; i++)
{
if (pProcessed[i])
continue;
float fCurVal = pfVal[i];
pnElementCountPerGroup[nGroupIdx] ++;
pProcessed[i] = TRUE;
pnElementPermutation[nPermutationIdx] = i;
nPermutationIdx ++;
int j;
for (j=i+1; j<nValCount; j++)
{
if (pProcessed[j])
continue;
//属于同一组。
if (IS_IN_DIFF_RANGE(pfVal[j] - fCurVal))
{
pnElementCountPerGroup[nGroupIdx] ++;
pnElementPermutation[nPermutationIdx] = j;
nPermutationIdx ++;
pProcessed[j] = TRUE;
}
}
pfGroupVal[nGroupIdx] = fCurVal;
nGroupIdx ++;
}
delete[] pProcessed;
nGroupCount = nGroupIdx;
return;
}
//两个点相互在8领域内。
BOOL IsNeighbor(POINT& ptA, POINT& ptB)
{
int nOffsetX = ptA.x - ptB.x;
int nOffsetY = ptA.y - ptB.y;
if (nOffsetX >= -1 && nOffsetX <= 1 && nOffsetY >= -1 && nOffsetY <= 1)
return TRUE;
else
return FALSE;
}
#define MID_CAST(x) ((x) < 0 ? (int((x) - 0.5f)) : (int((x) + 0.5f)))
//给定一条直线上的数据点,判断共存在多少线段。
//输入 ptLine - 直线上的点坐标集合。
// nLinePointCount - 直线上的点数量。
// fLineAngle - 直线和水平方向的夹角。
//输出 nLineSegmentCount - 线段数量。
// pnLineSegmentLen - 每条线段的长度。
// pnLineSegmentLen 的内存由调用者分配,大小是 nLinePointCount。
void FindLineSegment(POINT ptLine[], int nLinePointCount, float fLineAngle, int& nLineSegmentCount, int* pnLineSegmentLen)
{
nLineSegmentCount = 0;
memset(pnLineSegmentLen, 0, nLinePointCount*sizeof(int));
float fAngleTan = tan(fLineAngle);
int i, nLineSegmentLen = 0;
for (i=0; i<nLinePointCount-1; i++)
{
POINT ptCur;
ptCur.x = ptLine[i].x;
ptCur.y = ptLine[i].y;
nLineSegmentLen ++;
if (IsNeighbor(ptCur, ptLine[i+1]))
continue;
//计算直线上和当前点相邻的点。一共有两个相邻点,但由于 ptLine 中的数据的Y坐标递增的,所以只要求一个Y坐标非减的相邻点即可。
POINT ptNext;
if (IS_ZERO(fLineAngle - 0))
{
ptNext.x = ptCur.x + 1;
ptNext.y = ptCur.y;
}
else if (IS_ZERO(fLineAngle - PI / 2))
{
ptNext.x = ptCur.x;
ptNext.y = ptCur.y + 1;
}
else
{
if (fAngleTan < 1 && fAngleTan > -1)
{
float fNextX = ptCur.x - 1 / fAngleTan;
ptNext.x = MID_CAST(fNextX);
ptNext.y = ptCur.y + 1;
}
else
{
ptNext.x = ptCur.x - 1;
float fNextY = ptCur.y + fAngleTan;
ptNext.y = MID_CAST(fNextY);
}
}
//直线断开。
if (ptNext.x != ptLine[i+1].x || ptNext.y != ptLine[i+1].y)
{
pnLineSegmentLen[nLineSegmentCount] = nLineSegmentLen;
nLineSegmentLen = 0;
nLineSegmentCount ++;
}
}
//最后一个点要算在最后一个线段中。
nLineSegmentLen ++;
pnLineSegmentLen[nLineSegmentCount] = nLineSegmentLen;
nLineSegmentCount ++;
return;
}
typedef vector<POINT*> VEC_LINE;
void FindLines(const BYTE* pbyBinaryImageData, int nWidth, int nHeight,
int nAngleCount, float arrfAngle[], int nMinPointCountPerLine,
int& nLineCount, VEC_LINE* pVecLine, float* pfLineAngle)
{
int nImageSize = nWidth * nHeight;
int nForegroundCount = 0;
int i;
for (i=0; i<nImageSize; i++)
{
if (!pbyBinaryImageData[i])
continue;
nForegroundCount ++;
}
//过 (x, y) 点,与水平方向夹角是 alpha 的直线方程是
//Y = tan(alpha) * (X - x) + y 。
//可以化成 sin(alpha) * X - cos(alpha) * Y + (cos(alpha) * y - sin(alpha) * x) = 0 。
//原点(0, 0) 到上述直线的距离是 fabs(cos(alpha) * y - sin(alpha) * x) 。
//原点(0, 0) 到上述直线的垂线向量是 (cos(alpha) * y - sin(alpha) * x) 。
float* pfAngleCos = new float[nAngleCount];
float* pfAngleSin = new float[nAngleCount];
for (i=0; i<nAngleCount; i++)
{
pfAngleCos[i] = cos(arrfAngle[i]);
pfAngleSin[i] = sin(arrfAngle[i]);
}
//共存在 nAngleCount 个角度,每个角度的直线最多包含的点数是 nForegroundCount。
//同角度的直线可能相互平行,但它们所含像素点的和应小于 nForegroundCount。
//创建一个二维数组,保存原点到所有可能直线的距离。
float** ppfRou = new float*[nAngleCount];
int** ppnCoorX = new int*[nAngleCount];
int** ppnCoorY = new int*[nAngleCount];
for (i=0; i<nAngleCount; i++)
{
ppfRou[i] = new float[nForegroundCount];
ppnCoorX[i] = new int[nForegroundCount];
ppnCoorY[i] = new int[nForegroundCount];
}
int x, y, nImageIdx = 0, nForegroundIdx = 0;
for (i=0; i<nAngleCount; i++)
{
float fCurAngle = arrfAngle[i];
//对锐角从右往左扫描,否则从左往右扫描。
if (fCurAngle < PI_HALF)
{
nForegroundIdx = 0;
for (y=0; y<nHeight; y++)
for (x=nWidth-1; x>=0; x--)
{
nImageIdx = y*nWidth + x;
if (!pbyBinaryImageData[nImageIdx])
continue;
// 这里用向量,不用距离,位于原点的两侧等距处的直线应该算两条。
// 这里 y 取负值,因为普通的直角坐标系 y 从上到下是递减的。
//ppfRou[i][nForegroundIdx] = (pfAngleCos[i] * (-y) - pfAngleSin[i] * x);
// 这里做个取整处理,降低对连续性的判断难度。
ppfRou[i][nForegroundIdx] = MID_CAST(pfAngleCos[i] * (-y) - pfAngleSin[i] * x);
ppnCoorX[i][nForegroundIdx] = x;
ppnCoorY[i][nForegroundIdx] = y;
nForegroundIdx ++;
}
}
else
{
nImageIdx = 0, nForegroundIdx = 0;
for (y=0; y<nHeight; y++)
for (x=0; x<nWidth; x++, nImageIdx++)
{
if (!pbyBinaryImageData[nImageIdx])
continue;
ppfRou[i][nForegroundIdx] = MID_CAST(pfAngleCos[i] * (-y) - pfAngleSin[i] * x);
ppnCoorX[i][nForegroundIdx] = x;
ppnCoorY[i][nForegroundIdx] = y;
nForegroundIdx ++;
}
}
}
nLineCount = 0;
int nGroupCount;
int* pnElementCountPerGroup = new int[nForegroundCount];
int* pnElementPermutation = new int[nForegroundCount];
float* pfGroupVal = new float[nForegroundCount];
for (i=0; i<nAngleCount; i++)
{
CalcGroup(ppfRou[i], nForegroundCount, nGroupCount, pnElementCountPerGroup, pnElementPermutation, pfGroupVal);
float fCurLineAngle = arrfAngle[i];
int j, nPermutationPos = 0;
for (j=0; j<nGroupCount; j++)
{
int nLinePointCount = pnElementCountPerGroup[j];
if (nLinePointCount >= nMinPointCountPerLine)
{
//找到了一条角度为 arrfAngle[i] 的直线。
//找出这条直线中的线段数。
//取出这条直线上所有点的坐标。
POINT* ptLine = new POINT[nLinePointCount];
int k;
for (k=0; k<nLinePointCount; k++)
{
int nCoorIdx = pnElementPermutation[nPermutationPos];
ptLine[k].x = ppnCoorX[i][nCoorIdx];
ptLine[k].y = ppnCoorY[i][nCoorIdx];
nPermutationPos++;
}
int nLineSegmentCount;
int* pnLineSegmentLen = new int[nLinePointCount];
FindLineSegment(ptLine, nLinePointCount, fCurLineAngle, nLineSegmentCount, pnLineSegmentLen);
int nLineSegmentPos = 0;
for (k=0; k<nLineSegmentCount; k++)
{
int nLineSegmentLen = pnLineSegmentLen[k];
if (nLineSegmentLen >= nMinPointCountPerLine)
{
int l;
for (l=0; l<nLineSegmentLen; l++, nLineSegmentPos++)
{
POINT* pt = new POINT;
pt->x = ptLine[nLineSegmentPos].x;
pt->y = ptLine[nLineSegmentPos].y;
pVecLine[nLineCount].push_back(pt);
}
pfLineAngle[nLineCount] = fCurLineAngle;
nLineCount ++;
}
else
nLineSegmentPos += nLineSegmentLen;
}
delete[] ptLine;
delete[] pnLineSegmentLen;
}
else
nPermutationPos += nLinePointCount;
}
}
delete[] pfAngleCos;
delete[] pfAngleSin;
for (i=0; i<nAngleCount; i++)
{
delete[] ppfRou[i];
delete[] ppnCoorX[i];
delete[] ppnCoorY[i];
}
delete[] ppfRou;
delete[] ppnCoorX;
delete[] ppnCoorY;
delete[] pnElementCountPerGroup;
delete[] pnElementPermutation;
delete[] pfGroupVal;
return;
}
struct stLineInfo
{
int nNo;
int nLineLen;
};
void CopyLines(VEC_LINE* pvecDst, const VEC_LINE* pvecSrc, int nLineCount)
{
int i;
for (i=0; i<nLineCount; i++)
{
int nSize = pvecSrc[i].size();
int j;
for (j=0; j<nSize; j++)
{
POINT* pt = new POINT;
pt->x = pvecSrc[i][j]->x;
pt->y = pvecSrc[i][j]->y;
pvecDst[i].push_back(pt);
}
}
return;
}
void EmptyLines(VEC_LINE* pvecLines, int nLineCount)
{
int i;
for (i=0; i<nLineCount; i++)
{
int nSize = pvecLines[i].size();
int j;
for (j=0; j<nSize; j++)
delete pvecLines[i][j];
pvecLines[i].clear();
}
return;
}
bool CompareLineLen(const stLineInfo& a, const stLineInfo& b)
{
return a.nLineLen > b.nLineLen;
}
//输入 nWidth / nHeight - 图像宽 / 高。
// nLineCount - 所有直线数量。
// pVecLine - 所有直线中的点坐标。
// pfLineAngle - 所有直线和水平方向的夹角。
//输出 nLineCount - 去除重叠直线后剩余的数量。
// pVecLine - 剩余直线中的点坐标。
// pfLineAngle - 剩余直线和水平方向的夹角。
void RemoveOverlapLines(int nWidth, int nHeight, int& nLineCount, VEC_LINE* pVecLine, float* pfLineAngle)
{
int nImageSize = nWidth * nHeight;
int nOldLineCount = nLineCount;
nLineCount = 0;
//先把直线信息复制一份出来,再把输入的直线数组清空。
VEC_LINE* _pVecLine = new VEC_LINE[nOldLineCount];
CopyLines(_pVecLine, pVecLine, nOldLineCount);
EmptyLines(pVecLine, nOldLineCount);
float* _pfLineAngle = new float[nOldLineCount];
memcpy(_pfLineAngle, pfLineAngle, nOldLineCount * sizeof(float));
//把直线按长度排序。
stLineInfo* pLineInfo = new stLineInfo[nOldLineCount];
int i;
for (i=0; i<nOldLineCount; i++)
{
int nLinePointCount = _pVecLine[i].size();
pLineInfo[i].nNo = i;
pLineInfo[i].nLineLen = nLinePointCount;
}
stable_sort(pLineInfo, pLineInfo+nOldLineCount, CompareLineLen);
//做一个状态表。初始值都是 FALSE,有线经过的点的状态置成 TRUE。
BOOL* pbState = new BOOL[nImageSize];
for (i=0; i<nImageSize; i++)
pbState[i] = FALSE;
//先从最长的线开始。
for (i=0; i<nOldLineCount; i++)
{
int nNo = pLineInfo[i].nNo;
int nLinePointCount = pLineInfo[i].nLineLen;
int nOverlapPointCount = 0; //表示直线中有多少点被其他直线覆盖,如果完全被覆盖,则去除这条直线。
int j;
for (j=0; j<nLinePointCount; j++)
{
int x = _pVecLine[nNo][j]->x;
int y = _pVecLine[nNo][j]->y;
int nImageIdx = y * nWidth + x;
//这个点被其他直线覆盖了。
if (pbState[nImageIdx])
nOverlapPointCount ++;
else
pbState[nImageIdx] = TRUE;
}
//没有被完全覆盖,保留直线。
if (nOverlapPointCount < nLinePointCount)
{
CopyLines(&pVecLine[nLineCount], &_pVecLine[nNo], 1);
pfLineAngle[nLineCount] = _pfLineAngle[nNo];
nLineCount++;
}
}
EmptyLines(_pVecLine, nOldLineCount);
delete[] _pVecLine;
delete[] _pfLineAngle;
delete[] pLineInfo;
delete[] pbState;
return;
}
//输入 pbyImageData / nWidth / nHeight - 灰度图像数据 / 图像宽 / 图像高。
// nAngleCount - 要检测直线角度的数量。
// arrfAngle - 每个角度的弧度值。
// nMinPointCountPerLine - 每条直线最少包含的像素点数量。
//
//输出 nLineCount - 找到的直线数量。
// pVecLine - 保存每条直线中所有点的(x,y)坐标。
// pfLineAngle - 保存每条直线和水平方向的夹角。
// bBinaryImage - pbyImageData 中的图像是否二值化图。
// pbyBinaryImage - 保存中间结果的二值图。
// pVecLine 和 pfLineAngle 的内存由调用者分配,大小是 图像大小 × 所有角度。
void HoughTrans(const BYTE* pbyImageData, int nWidth, int nHeight,
int nAngleCount, float arrfAngle[],
int nMinPointCountPerLine,
int& nLineCount, VEC_LINE* pVecLine, float* pfLineAngle,
BOOL bBinaryImage = FALSE,
BYTE* pbyBinaryImage = NULL)
{
int nImageSize = nWidth * nHeight;
BYTE* _pbyBinaryImage = new BYTE[nImageSize];
if (bBinaryImage)
memcpy(_pbyBinaryImage, pbyImageData, nImageSize);
else
{
//做边缘检测。
EdgeDetect(pbyImageData, nWidth, nHeight, _pbyBinaryImage);
//二值化。
// a、求二值化阈值。
int nThreshold = Ostu(_pbyBinaryImage, nImageSize);
// b、二值化。
ImageThresholding(_pbyBinaryImage, nImageSize, nThreshold);
}
if (pbyBinaryImage)
memcpy(pbyBinaryImage, _pbyBinaryImage, nImageSize);
//确定直线。
FindLines(_pbyBinaryImage, nWidth, nHeight, nAngleCount, arrfAngle, nMinPointCountPerLine, nLineCount, pVecLine, pfLineAngle);
//去除相互重叠的直线。
if (nLineCount > 1)
RemoveOverlapLines(nWidth, nHeight, nLineCount, pVecLine, pfLineAngle);
delete[] _pbyBinaryImage;
return;
}
2011-05-27
在我以往的概念里,Hough变换就是“利用直角坐标系中一条线对应极坐标系中一个点的原理,通过点来找线。”,但要动手编程时,问题就来了,把(x,y)换算成(ρ,θ),是一一对应的,那么一条线上每个点的坐标不同,对应的(ρ,θ)也不同,怎么会对应到一个点上?
昨天看了维基百科中的解释(顺便说一句,我总是先看中文版的,但遗憾的是有的词条没有中文版,有的中文版相当简单,没办法还是要看E文的。),看着看着就不太懂了。今天早上从地铁站出来,一路走一路想,居然想通了,很开心。
道理其实很简单,就是把图像左上角看成原点,对图像中的每个点(x,y),设通过这个点有N条直线(如果需要检测直线的角度越多,N值就越大,速度就越慢。),原点到这N条直线都有一个距离ρi和夹角θi(i∈[1,N])(需要注意的是这里的(ρ,θ)表示的是从原点到直线的距离和该垂线和x轴的夹角,而不是原点到(x,y)点的距离和夹角。),如图1所示,
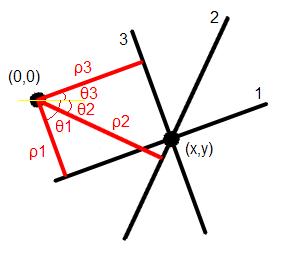
图1:N=3的情况,3条直线的角度分别是20°、65°、110°,(x,y)对应的参数集是(ρ1,2π-θ1)、(ρ2,2π-θ2)、(ρ3,θ3)。
那么这个点就对应N个(ρ,θ)值,把每个值看成一个盒子的标签,盒子里有个计数器(初值为0),计数器加1。假设有M点共线,它们就会有一个相同的(ρ,θ)值,对应盒子中计数器的值就为M。把图像中所有点遍历以后,统计每个盒子中的计数器,从大到小排序并设个阈值,就知道图像中有几条线了,根据盒子的标签(ρ,θ)值,就能算出直线方程了,如果要找出该直线在图像中对应的点,只需把点的直角坐标也投入盒子即可。
问题又来了,整个过程貌似和图像内容无关啊,那白纸也能检出直线了,怎么可能呢?再看维基百科,终于清楚了,原来不是遍历图像中的所有点,而是边缘点。从编程角度,就是先做边缘检测,再二值化,再做直线检测即可。盒子的最大数量就是“边缘点数目*N”。