Android 的 HAL(Hardware Abstract Layer硬件抽象层)是Google因应厂商「希望不公开源码」的要求下,所推出的新观念,其架构如下图。虽然 HAL 现在的「抽象程度」还不足,现阶段实作还不是全面符合 HAL的架构规划,不过也确实给了我们很好的思考空间。

图1:Android HAL 架构规划
这是 Patrick Brady (Google) 在2008 Google I/O 所发表的演讲「Anatomy & Physiology of an Android」中,所提出的 Android HAL 架构图。从这张架构图我们知道,HAL 的目的是为了把 Android framework 与 Linux kernel 完整「隔开」。让 Android 不至过度依赖 Linux kernel,有点像是「kernel independent」的意思,让 Android framework 的开发能在不考虑驱动程序的前提下进行发展。
在 Android 原始码里,HAL 主要的实作储存于以下目录:
1. libhardware_legacy/ - 过去的实作、采取链接库模块的观念进行
2. libhardware/ - 新版的实作、调整为 HAL stub 的观念
3. ril/ - Radio Interface Layer
在 HAL 的架构实作成熟前(即图1的规划),我们先就目前 HAL 现况做一个简单的分析。另外,目前 Android 的 HAL实作,仍旧散布在不同的地方,例如 Camera、WiFi 等,因此上述的目录并不包含所有的 HAL 程序代码。
2 HAL 的过去
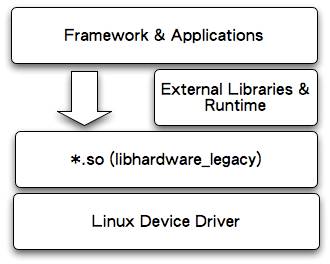
图2:Android HAL / libhardware_legacy
过 去的 libhardware_legacy 作法,比较是传统的「module」方式,也就是将 *.so 档案当做「shared library」来使用,在runtime(JNI 部份)以 direct function call 使用 HAL module。透过直接函数呼叫的方式,来操作驱动程序。当然,应用程序也可以不需要透过 JNI 的方式进行,直接以加载 *.so 檔(dlopen)的做法呼叫*.so 里的符号(symbol)也是一种方式。总而言之是没有经过封装,上层可以直接操作硬件。
3 HAL 的现况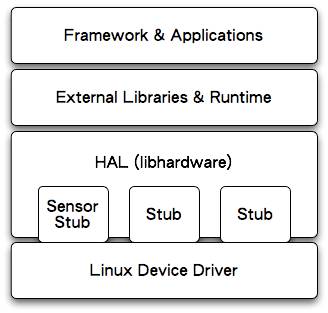
图3:Android HAL / libhardware
现 在的 libhardware 作法,就有「stub」的味道了。HAL stub 是一种代理人(proxy)的概念,stub 虽然仍是以 *.so檔的形式存在,但 HAL 已经将 *.so 档隐藏起来了。Stub 向 HAL「提供」操作函数(operations),而 runtime 则是向 HAL 取得特定模块(stub)的 operations,再 callback 这些操作函数。这种以 indirect function call 的实作架构,让HAL stub 变成是一种「包含」关系,即 HAL 里包含了许许多多的
stub(代理人)。Runtime 只要说明「类型」,即 module ID,就可以取得操作函数。对于目前的HAL,可以认为Android定义了HAL层结构框架,通过几个接口访问硬件从而统一了调用方式。
4 HAL_legacy和HAL的对比
HAL_legacy:旧式的HAL是一个模块,采用 共享库形式,在编译时会调用到。由于采用function
call形式调用,因此可被多个进程使用,但会被mapping到多个进程空间中,造 成浪费,同时需要考虑代码能否安全重入的问题(thread safe)。
HAL:新式的HAL采用HAL module和HAL stub结合形式,HAL stub不是一个share library,编译时上层只拥有访问HAL stub的函数指针,并不需要HAL stub。上层通过HAL module提供的统一接口获取并操作HAL stub,so文件只会被mapping到一个进程,也不存在重复mapping和重入问题。
5 HAL module架构
HAL moudle主要分为三个结构:
struct hw_module_t;
struct hw_module_methods_t;
struct hw_device_t;
他 们的继承关系如下图:

图4:Android HAL结构继承关系
6 HAL使用方法
(1)Native code通过hw_get_module调 用获取HAL stub:
hw_get_module (LED_HARDWARE_MODULE_ID, (const hw_module_t**)&module)
(2)通过继承hw_module_methods_t的callback来 open设备:
module->methods->open(module,
LED_HARDWARE_MODULE_ID, (struct hw_device_t**)device);
(3)通过继承 hw_device_t的callback来控制设备:
sLedDevice->set_on(sLedDevice, led);
sLedDevice->set_off(sLedDevice, led);
7 HAL stub编写方法
(1)定义自己的HAL结构体,编写头文件led.h, hardware/hardware.h
struct led_module_t {
struct hw_module_t common;
};
struct led_control_device_t {
struct hw_device_t common;
int fd; /* file descriptor of LED device */
/* supporting control APIs go here */
int (*set_on)(struct led_control_device_t *dev, int32_t led);
int (*set_off)(struct led_control_device_t *dev, int32_t led);
};
继 承关系如下图:

图5:HAL stub与HAL module继承关系
(2) 设计led.c 完成功能实现和HAL stub注册
(2.1)led_module_methods继承 hw_module_methods_t,实现open的callback
struct hw_module_methods_t led_module_methods = {
open: led_device_open
};
(2.2)用 HAL_MODULE_INFO_SYM实例led_module_t,这个名称不可修改
tag:需要制定为 HARDWARE_MODULE_TAG
id:指定为 HAL Stub 的 module ID
methods:struct hw_module_methods_t,为 HAL 所定义的「method」
const struct led_module_t HAL_MODULE_INFO_SYM = {
common: {
tag: HARDWARE_MODULE_TAG,
version_major: 1,
version_minor: 0,
id: LED_HARDWARE_MODULE_ID,
name: "Sample LED Stub",
author: "The Mokoid Open Source Project",
methods: &led_module_methods,
}
/* supporting APIs go here. */
};
(2.3)open是一个必须实现的callback API,负责申请结构体空间,填充信息,注册具体操作API接口,打开Linux驱动。
由于存在多重继承关系,只需对子结构体hw_device_t对象申请空间即可。
int led_device_open(const struct hw_module_t* module, const char* name,
struct hw_device_t** device)
{
struct led_control_device_t *dev;
dev = (struct led_control_device_t *)malloc(sizeof(*dev));
memset(dev, 0, sizeof(*dev));
dev->common.tag = HARDWARE_DEVICE_TAG;
dev->common.version = 0;
dev->common.module = module;
dev->common.close = led_device_close;
dev->set_on = led_on;
dev->set_off = led_off;
*device = &dev->common;
/*
* Initialize Led hardware here.
*/
dev->fd = open(LED_DEVICE, O_RDONLY);
if (dev->fd < 0)
return -1;
led_off(dev, LED_C608);
led_off(dev, LED_C609);
success:
return 0;
}
(2.4)填充具体API操作代码
int led_on(struct led_control_device_t *dev, int32_t led)
{
int fd;
LOGI("LED Stub: set %d on.", led);
fd = dev->fd;
switch (led) {
case LED_C608:
ioctl(fd, 1, &led);
break;
case LED_C609:
ioctl(fd, 1, &led);
break;
default:
return -1;
}
return 0;
}
int led_off(struct led_control_device_t *dev, int32_t led)
{
int fd;
LOGI("LED Stub: set %d off.", led);
fd = dev->fd;
switch (led) {
case LED_C608:
ioctl(fd, 2, &led);
break;
case LED_C609:
ioctl(fd, 2, &led);
break;
default:
return -1;
}
return 0;
}
Android HAL 是如何被调用的
Android 对硬件的调用, google 推荐使用 HAL 的方式进行调用,对于 Andriod HAL 的写法,可以参考android 源码里的 hardware 目录下几个模块的模版。
在看 HAL 的编写方法的过程中,会发现整个模块貌似没有一个入口。一般说来模块都要有个入口,比如应用程序有 main 函数,可以为加载器进行加载执行, dll 文件有 dllmain ,而对于我们自己写的动态链接库,我们可以对库中导出的任何符号进行调用。
问题来了, Android 中的 HAL 是比较具有通用性的,需要上层的函数对其进行加载调用, Android 的 HAL加载器是如何实现对不同的 Hardware Module 进行通用性的调用的呢?
带着这个疑问查看 Android 源码,会发现 Android 中实现调用 HAL 是通过 hw_get_module 实现的。
int hw_get_module(const char *id, const struct hw_module_t **module);
这是其函数原型, id 会指定 Hardware 的 id ,这是一个字符串,比如 sensor 的 id 是
#define SENSORS_HARDWARE_MODULE_ID "sensors" ,如果找到了对应的 hw_module_t 结构体,会将其指针放入 *module 中。看看它的实现。。。。
|
/* Loop through the configuration variants looking for a module */ for (i=0 ; i<HAL_VARIANT_KEYS_COUNT+1 ; i++) { if (i < HAL_VARIANT_KEYS_COUNT) { // 获取 ro.hardware/ro.product.board/ro.board.platform/ro.arch 等 key 的值。 if (property_get(variant_keys[i], prop, NULL) == 0) { continue; } snprintf(path, sizeof(path), "%s/%s.%s.so", HAL_LIBRARY_PATH, id, prop); // 如果开发板叫做 mmdroid, 那么这里的 path 就是system/lib/hw/sensor.mmdroid.so } else { snprintf(path, sizeof(path), "%s/%s.default.so", HAL_LIBRARY_PATH, id);// 默认会加载 /system/lib/hw/sensor.default.so
} if (access(path, R_OK)) { continue; } /* we found a library matching this id/variant */ break; } |
|
status = -ENOENT; if (i < HAL_VARIANT_KEYS_COUNT+1) { /* load the module, if this fails, we're doomed, and we should not try * to load a different variant. */ status = load(id, path, module);// 调用 load 函数打开动态链接库 } |
|
|
|
|
获取了动态链接库的路径之后,就会调用 load 函数打开它,下面会打开它。
奥秘在 load 中
|
static int load(const char *id, const char *path, const struct hw_module_t **pHmi) { int status; void *handle; struct hw_module_t *hmi;
/* * load the symbols resolving undefined symbols before * dlopen returns. Since RTLD_GLOBAL is not or'd in with * RTLD_NOW the external symbols will not be global */ handle = dlopen(path, RTLD_NOW);// 打开动态库 if (handle == NULL) { char const *err_str = dlerror(); LOGE("load: module=%s/n%s", path, err_str?err_str:"unknown"); status = -EINVAL; goto done; }
/* Get the address of the struct hal_module_info. */ const char *sym = HAL_MODULE_INFO_SYM_AS_STR;// 被定义为了“ HMI ” hmi = (struct hw_module_t *)dlsym(handle, sym);// 查找“ HMI ”这个导出符号,并获取其地址 if (hmi == NULL) { LOGE("load: couldn't find symbol %s", sym); status = -EINVAL; goto done; }
/* Check that the id matches */ // 找到了 hw_module_t 结构!!! if (strcmp(id, hmi->id) != 0) { LOGE("load: id=%s != hmi->id=%s", id, hmi->id); status = -EINVAL; goto done; }
hmi->dso = handle;
/* success */ status = 0;
done: if (status != 0) { hmi = NULL; if (handle != NULL) { dlclose(handle); handle = NULL; } } else { LOGV("loaded HAL id=%s path=%s hmi=%p handle=%p", id, path, *pHmi, handle); } // 凯旋而归 *pHmi = hmi;
return status; } |
从上面的代码中,会发现一个很奇怪的宏 HAL_MODULE_INFO_SYM_AS_STR ,它直接被定义为了#define HAL_MODULE_INFO_SYM_AS_STR "HMI" ,为何根据它就能从动态链接库中找到这个 hw_module_t结构体呢?我们查看一下我们用到的 hal 对应的 so 就可以了,在 linux 中可以使用 readelf XX.so –s 查看。
|
Symbol table '.dynsym' contains 28 entries: Num: Value Size Type Bind Vis Ndx Name 0: 00000000 0 NOTYPE LOCAL DEFAULT UND 1: 00000594 0 SECTION LOCAL DEFAULT 7 2: 00001104 0 SECTION LOCAL DEFAULT 13 3: 00000000 0 FUNC GLOBAL DEFAULT UND ioctl 4: 00000000 0 FUNC GLOBAL DEFAULT UND strerror 5: 00000b84 0 NOTYPE GLOBAL DEFAULT ABS __exidx_end 6: 00000000 0 OBJECT GLOBAL DEFAULT UND __stack_chk_guard 7: 00000000 0 FUNC GLOBAL DEFAULT UND __aeabi_unwind_cpp_pr0 8: 00000000 0 FUNC GLOBAL DEFAULT UND __errno 9: 00001188 0 NOTYPE GLOBAL DEFAULT ABS _bss_end__ 10: 00000000 0 FUNC GLOBAL DEFAULT UND malloc 11: 00001188 0 NOTYPE GLOBAL DEFAULT ABS __bss_start__ 12: 00000000 0 FUNC GLOBAL DEFAULT UND __android_log_print 13: 00000b3a 0 NOTYPE GLOBAL DEFAULT ABS __exidx_start 14: 00000000 0 FUNC GLOBAL DEFAULT UND __stack_chk_fail 15: 00001188 0 NOTYPE GLOBAL DEFAULT ABS __bss_end__ 16: 00001188 0 NOTYPE GLOBAL DEFAULT ABS __bss_start 17: 00000000 0 FUNC GLOBAL DEFAULT UND memset 18: 00000000 0 FUNC GLOBAL DEFAULT UND __aeabi_uidiv 19: 00001188 0 NOTYPE GLOBAL DEFAULT ABS __end__ 20: 00001188 0 NOTYPE GLOBAL DEFAULT ABS _edata 21: 00001188 0 NOTYPE GLOBAL DEFAULT ABS _end 22: 00000000 0 FUNC GLOBAL DEFAULT UND open 23: 00080000 0 NOTYPE GLOBAL DEFAULT ABS _stack 24: 00001104 128 OBJECT GLOBAL DEFAULT 13 HMI 25: 00001104 0 NOTYPE GLOBAL DEFAULT 13 __data_start 26: 00000000 0 FUNC GLOBAL DEFAULT UND close 27: 00000000 0 FUNC GLOBAL DEFAULT UND free |
从上面中,第 24 个符号,名字就是“ HMI ”,对应于 hw_module_t 结构体。再去对照一下 HAL 的代码。
|
/* * The COPYBIT Module */ struct copybit_module_t HAL_MODULE_INFO_SYM = { common: { tag: HARDWARE_MODULE_TAG, version_major: 1, version_minor: 0, id: COPYBIT_HARDWARE_MODULE_ID, name: "QCT MSM7K COPYBIT Module", author: "Google, Inc.", methods: ©bit_module_methods } }; |
这里定义了一个名为 HAL_MODULE_INFO_SYM 的 copybit_module_t 的结构体, common 成员为hw_module_t 类型。注意这里的 HAL_MODULE_INFO_SYM 变量必须为这个名字,这样编译器才会将这个结构体的导出符号变为“ HMI ”,这样这个结构体才能被 dlsym 函数找到!
综上,我们知道了 andriod HAL 模块也有一个通用的入口地址,这个入口地址就是HAL_MODULE_INFO_SYM 变量,通过它,我们可以访问到 HAL 模块中的所有想要外部访问到的方法。
转自:http://blog.csdn.net/k229650014/article/details/5801397