原文出处:http://www.cnblogs.com/nick123/archive/2010/09/05/1818471.html
内核版本:2.6.31.6
首先在S3C2440平台的初始化函数中,主要是将开发平台的设备注册进了系统,也就是将device注册到了platform虚拟的总线上,并进行了一些初始化的工作,这里我们只关注I2C的部分。
static void __init smdk2440_machine_init(void)
{
s3c24xx_fb_set_platdata(&smdk2440_fb_info);
s3c_i2c0_set_platdata(NULL);
platform_add_devices(smdk2440_devices, ARRAY_SIZE(smdk2440_devices));
smdk_machine_init();
}
s3c_i2c0_set_platdata()函数将S3C2440上的I2C控制器进行了一些初始化,但是并没有写入硬件寄存器,仅仅是保存在了s3c2410_platform_i2c结构体中。
void __init s3c_i2c0_set_platdata(struct s3c2410_platform_i2c *pd)
{
struct s3c2410_platform_i2c *npd;
if (!pd)
pd = &default_i2c_data0;
npd = kmemdup(pd, sizeof(struct s3c2410_platform_i2c), GFP_KERNEL);
if (!npd)
printk(KERN_ERR "%s: no memory for platform data\n", __func__);
else if (!npd->cfg_gpio)
npd->cfg_gpio = s3c_i2c0_cfg_gpio;
/* s3c_i2c0_cfg_gpio为 配置I2C控制器GPIO函数指针 */
s3c_device_i2c0.dev.platform_data = npd;
/*最后将struct device 中的platform_data指针直指向了初始化后的 s3c2410_platform_i2c结构体 */
}
函数s3c_i2c0_cfg_gpio()很简单,实际上就是配置GPIO为I2C的工作模式
void s3c_i2c0_cfg_gpio(struct platform_device *dev)
{
s3c2410_gpio_cfgpin(S3C2410_GPE(15), S3C2410_GPE15_IICSDA);
s3c2410_gpio_cfgpin(S3C2410_GPE(14), S3C2410_GPE14_IICSCL);
}
s3c_i2c0_set_platdata(struct s3c2410_platform_i2c *pd)函数实际上就是把初始化数据段中的default_i2c_data0结构体复制过来,然后对GPIO进行配置的函数指针进行了初始化。default_i2c_data0结构体如下:
static struct s3c2410_platform_i2c default_i2c_data0 __initdata = {
.flags = 0,
.slave_addr = 0x10,
.frequency = 100*1000,
.sda_delay = 100,
};
s3c2410_platform_i2c结构体原型如下,根据英文注释即可大致理解其意思
/**
* struct s3c2410_platform_i2c - Platform data for s3c I2C.
* @bus_num: The bus number to use (if possible).
* @flags: Any flags for the I2C bus (E.g. S3C_IICFLK_FILTER).
* @slave_addr: The I2C address for the slave device (if enabled).
* @frequency: The desired frequency in Hz of the bus. This is
* guaranteed to not be exceeded. If the caller does
* not care, use zero and the driver will select a
* useful default.
* @sda_delay: The delay (in ns) applied to SDA edges.
* @cfg_gpio: A callback to configure the pins for I2C operation.
*/
struct s3c2410_platform_i2c {
int bus_num;
unsigned int flags;
unsigned int slave_addr;
unsigned long frequency;
unsigned int sda_delay;
void (*cfg_gpio)(struct platform_device *dev);
};
在函数smdk2440_machine_init(void)中,调用了platform_add_devices(smdk2440_devices, ARRAY_SIZE(smdk2440_devices));
即将smdk2440_devices结构体数组中platform_device添加到了系统中,也就是添加到了platform总线上。smdk2440_devices的具体内容如下:
static struct platform_device *smdk2440_devices[] __initdata = {
&s3c_device_usb,
&s3c_device_lcd,
&s3c_device_wdt,
&s3c_device_i2c0,
&s3c_device_iis,
&s3c_device_dm9000,
&s3c_device_rtc,
};
其中s3c_device_i2c0保存了S3C2440中的I2C控制器的一些内部资源等信息,具体内容如下:
struct platform_device s3c_device_i2c0 = {
.name = "s3c2410-i2c",
/*设备名,platform总线的match函数中会用设备名和驱动名的比较来绑定设备和驱动程序*/
#ifdef CONFIG_S3C_DEV_I2C1
.id = 0,
#else
.id = -1,
#endif
.num_resources = ARRAY_SIZE(s3c_i2c_resource),
.resource = s3c_i2c_resource,
};
其中s3c_i2c_resource结构体保存了S3C2440中I2C控制器寄存器的物理地址和中断号等具体的硬件信息。
static struct resource s3c_i2c_resource[] = {
[0] = {
.start = S3C_PA_IIC,
.end = S3C_PA_IIC + SZ_4K - 1,
.flags = IORESOURCE_MEM,
},
[1] = {
.start = IRQ_IIC,
.end = IRQ_IIC,
.flags = IORESOURCE_IRQ,
},
};
在后面注册具体设备驱动时也会添加到paltform总线上,platform总线会将具体的设备和驱动进行绑定,这样驱动就可以操作具体的设备了。platform实际上是一个虚拟的总线,本质上也是一个设备。
好了,上面是一些板级的硬件设备资源向系统的注册,没有设计到具体的硬件操作,在加载驱动程序时,驱动程序会根据已经注册到系统的具体设备的硬件资源进行初始化,也就是进行一些硬件操作,控制硬件设备的正常工作,下面来分析驱动程序的加载过程。
S3C2440平台上的I2C的驱动程序在linux/drivers/i2c/busses/i2c-s3c2410.c文件中,
在驱动的加载程序中,将platform_driver类型的s3c24xx_i2c_driver注册到了系统中。
static int __init i2c_adap_s3c_init(void)
{
return platform_driver_register(&s3c24xx_i2c_driver);
}
分析platform_driver_register(&s3c24xx_i2c_driver);的源代码可知,实际上是将s3c24xx_i2c_driver注册到了platform总线上。
int platform_driver_register(struct platform_driver *drv)
{
drv->driver.bus = &platform_bus_type;
/*将device_driver中的probe,remove,shutdown函数指针指向platform_driver中的函数,后面进行驱动和设备绑定后会调用probe函数 */
if (drv->probe)
drv->driver.probe = platform_drv_probe;
if (drv->remove)
drv->driver.remove = platform_drv_remove;
if (drv->shutdown)
drv->driver.shutdown = platform_drv_shutdown;
return driver_register(&drv->driver);
}
下图即为Linux 2.6中引入的设备驱动模型的结构图(只是个总体框架,并不是指这的platform总线,设备和驱动)。
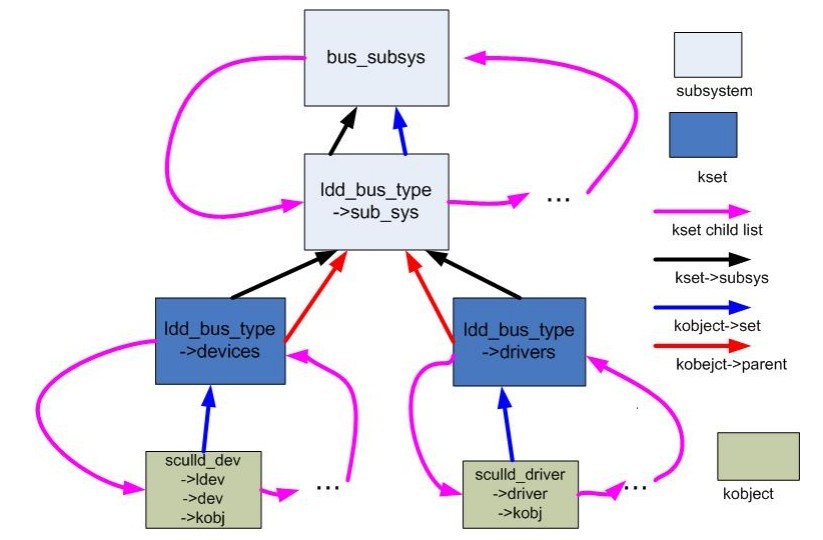
总线上包括设备和驱动的集合,总线上所有设备组成双向循环链表,包含在platform_device的设备集合中,总线上所有驱动组成双向循环链表,包含在platform_dirver的驱动集合中。
platform_driver_register(struct platform_driver *drv)函数实际上是对driver_register(struct device_driver *drv)函数的一个简单封装。driver_register()函数的调用关系如下
driver_register()
—>bus_add_driver(drv);
—> driver_attach(drv);
—> bus_for_each_dev(drv->bus, NULL, drv, __driver_attach);
bus_for_each_dev(drv->bus, NULL, drv, __driver_attach)函数会遍历总线上所有的设备,并调用__driver_attach函数,判断驱动是否和设备匹配,若匹配则将struct device中的 struct device_driver *driver指向此驱动,也就是进行了驱动和设备的绑定,若不匹配,则继续遍历下一个设备。事实上,在向总线注册设备时,同样会进行类似的操作,遍历总线上所有驱动程序,找到则进行设备与驱动程序的绑定。
static int __driver_attach(struct device *dev, void *data)
{
struct device_driver *drv = data;
/*
* Lock device and try to bind to it. We drop the error
* here and always return 0, because we need to keep trying
* to bind to devices and some drivers will return an error
* simply if it didn't support the device.
*
* driver_probe_device() will spit a warning if there
* is an error.
*/
/*调用platform总线的match()函数,即platform_match函数,判断设备和驱动是否匹配,若匹配则返真,找到对应的设备,继续执行后面的程序,若没有找到,则返回假,函数执行结束 。这里我们的I2C驱动找到了可以驱动的设备,所以会继续执行*/
if (!driver_match_device(drv, dev))
return 0;
if (dev->parent) /* Needed for USB */
down(&dev->parent->sem);
down(&dev->sem);
/*设备是否已经找到驱动?显然,这里没有找到驱动,因为设备在向系统中platform总线注册时还没有驱动注册到platform总线上,所以dev->drive = NULL */
if (!dev->driver)
driver_probe_device(drv, dev);
up(&dev->sem);
if (dev->parent)
up(&dev->parent->sem);
return 0;
}
driver_probe_device(drv, dev)函数进行驱动与设备的绑定。
/**
* driver_probe_device - attempt to bind device & driver together
* @drv: driver to bind a device to
* @dev: device to try to bind to the driver
*
* This function returns -ENODEV if the device is not registered,
* 1 if the device is bound sucessfully and 0 otherwise.
*
* This function must be called with @dev->sem held. When called for a
* USB interface, @dev->parent->sem must be held as well.
*/
int driver_probe_device(struct device_driver *drv, struct device *dev)
{
int ret = 0;
if (!device_is_registered(dev)) //判断设备是否已经注册
return -ENODEV;
pr_debug("bus: '%s': %s: matched device %s with driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
ret = really_probe(dev, drv);
return ret;
}
really_probe函数中 进行device和driver的绑定,并调用用户在device_driver 中注册的probe()例程。
static int really_probe(struct device *dev, struct device_driver *drv)
{
int ret = 0;
atomic_inc(&probe_count);
pr_debug("bus: '%s': %s: probing driver %s with device %s\n",
drv->bus->name, __func__, drv->name, dev_name(dev));
WARN_ON(!list_empty(&dev->devres_head));
/*将device中的device_driver指针指向了这个driver,即完成device和driver的绑定*/
dev->driver = drv;
if (driver_sysfs_add(dev)) {
printk(KERN_ERR "%s: driver_sysfs_add(%s) failed\n",
__func__, dev_name(dev));
goto probe_failed;
}
/*若总线设置了probe函数,则调用总线的probe函数,然而platform总线并没有设置 */
if (dev->bus->probe) {
ret = dev->bus->probe(dev);
if (ret)
goto probe_failed;
}
/* 否则,调用驱动注册在device_driver里的probe,这个函数中一般进行获得硬件资源,初始化硬件等操作,这里实际调用了s3c24xx_i2c_probe函数*/
else if (drv->probe) {
ret = drv->probe(dev);
if (ret)
goto probe_failed;
}
/*将设备添加到driver所支持的设备列表中(因为一个驱动可以支持多个设备),并通知bus上的设备,表明BUS_NOTIFY_BOUND_DRIVER */
driver_bound(dev);
ret = 1;
pr_debug("bus: '%s': %s: bound device %s to driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
goto done;
probe_failed:
devres_release_all(dev);
driver_sysfs_remove(dev);
dev->driver = NULL;
if (ret != -ENODEV && ret != -ENXIO) {
/* driver matched but the probe failed */
printk(KERN_WARNING
"%s: probe of %s failed with error %d\n",
drv->name, dev_name(dev), ret);
}
/*
* Ignore errors returned by ->probe so that the next driver can try
* its luck.
*/
ret = 0;
done:
atomic_dec(&probe_count);
wake_up(&probe_waitqueue);
return ret;
}
到这里,I2C设备软件层次上的驱动模型已经建立好了,接着会执行s3c24xx_i2c_probe函数,获取系统开始注册的一些硬件资源信息,进行硬件上的一些操作,以及真正的涉及到数据传输驱动程序的注册等操作。