一、电路原理图
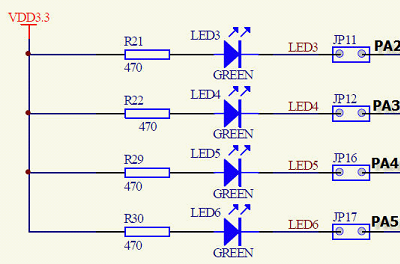
从图中可知,各LED是逢GPIO口为0,即低电平时亮,为1,即高电平时灭,呈反逻辑。由于四灯接至引脚号连续的GPIOA口的PIN2~PIN5,因此,可以方便地一次性控制四灯的工作状态。因此,首先定义LEDs为四个引脚的组合,代码如下:
#define LEDs GPIO_PIN_5 | GPIO_PIN_4 | GPIO_PIN_3 | GPIO_PIN_2
控制代码如下:
GPIOPinWrite(GPIO_PORTA_BASE, LEDs, temp<<2);
此处,temp左移2位,是使得temp的低四位可以对齐至PIN5,PIN4,PIN3,PIN2。
二、功能要求
(1)闪灭时间1s;
(2)起始状态LED3、LED4、LED5、LED6全灭;
(3)走马灯流程。
a.LED3亮(其他三灯灭)->LED4亮(其他三灯灭)->
LED5亮(其他三灯灭)->LED6亮(其他三灯灭)
b.四灯由灭到亮,由亮到灭闪烁4次
c.LED6亮(其他三灯灭)->LED5亮(其他三灯灭)->
LED4亮(其他三灯灭)->LED3亮(其他三灯灭)
d.继续流程b
如若定义状态编码如下:
|
LED6 |
LED5 |
LED4 |
LED3 |
|
MSB(0,灭;1,亮) |
(0,灭;1,亮) |
(0,灭;1,亮) |
(0,灭;1,亮)LSB |
例如:状态——LED6灭,LED5灭,LED灭,LED3亮,对应编码0001。
则每秒的状态如下所示:

三、功能实现
3.1 使用查询方式
从功能要求中,可以看到,此走马灯可以分为三种基本状态:
-
LED点亮顺序由小到大(即LED3->LED4->…………)
-
四灯同闪4次
-
LED点亮顺序由大到小(即LED6->LED5->…………)
因此设计三个函数完成以上3项功能:
3.1.1 ShiftUp
void ShiftUp()
{
int i = 0;
unsigned
char temp = 0;
for(i = 0; i <=3; i++){
temp = ~(0x01<<i);
GPIOPinWrite(GPIO_PORTA_BASE, LEDs, temp<<2);
SysCtlDelay(1000* (TheSysClock / 3000)); // 延时约1s
}
}
3.1.2 ShiftDown
void ShiftDown()
{
int i = 0;
unsigned
char temp = 0;
for(i = 0; i <=3; i++){
temp = ~(0x08>>i);
GPIOPinWrite(GPIO_PORTA_BASE, LEDs, temp<<2);
SysCtlDelay(1000* (TheSysClock / 3000)); // 延时约1s
}
}
3.1.3 Blinky
void Blinky(){
int i = 0;
for(i = 0; i <=3; i++)
{
GPIOPinWrite(GPIO_PORTA_BASE, LEDs, 0x00<<2);//亮
SysCtlDelay(1000* (TheSysClock / 3000)); // 延时约1s
GPIOPinWrite(GPIO_PORTA_BASE, LEDs, 0xFF<<2);//灭
SysCtlDelay(1000* (TheSysClock / 3000)); // 延时约1s
}
}
3.1.4 主程序
void main()
{
SysClkInit();
PortAInit();
while(1)
{
ShiftUp();
Blinky();
ShiftDown();
Blinky();
}
}
3.2 使用定时器中断方式
3.2.1 初始化Timer0A
void TimerAInit()
{
/* 使能定时器0外设 */
SysCtlPeripheralEnable( SYSCTL_PERIPH_TIMER0 );
/* 使能全局中断 */
IntMasterEnable();
/* 使能Timer0中断 */
GPIOPinTypeTimer(TIMER0_BASE, TIMER_A);
/* 设置定时器0为周期触发模式 */
TimerConfigure(TIMER0_BASE, TIMER_CFG_32_BIT_PER);
/* 设置定时器装载值:定时1/2秒 */
TimerLoadSet(TIMER0_BASE, TIMER_A, SysCtlClockGet());
/* 设置定时器为溢出中断 */
TimerIntEnable(TIMER0_BASE, TIMER_TIMA_TIMEOUT);
/* 使能定时器0 */
TimerEnable(TIMER0_BASE, TIMER_A);
/* 使能定时器0外设 */
IntEnable(INT_TIMER0A);
}
3.2.2 Timer0A中断服务程序
void Timer0A_ISR (void)
{
unsigned
char temp = 0;
/* 清除定时器0中断 */
TimerIntClear(TIMER0_BASE, TIMER_TIMA_TIMEOUT);
switch (status)
{
case 1:
temp = ~(0x01 << index);
index ++;
if(index == 4)
{
preStatus = 1;
status = 2;
index = 0;
}
break;
case 2:
if(index%2)
temp = ~(0x00);
else
temp = ~(0x0f);
index ++;
if(index == 8)
{
if(preStatus == 1)
status = 3;
else
status = 1;
index = 0;
}
break;
case 3:
temp = ~(0x08 >> index);
index ++;
if(index == 4)
{
preStatus = 3;
status = 2;
index = 0;
}
break;
default:
status = 1;
index = 0;
break;
}
GPIOPinWrite(GPIO_PORTA_BASE, LEDs, temp<<2);
/* 使能定时器0 */
TimerEnable(TIMER0_BASE, TIMER_A);
}
由于中断服务程序每秒进入一次,因此,需要记录每次进入中断服务时LED运行的状态,该状态由走马灯运行阶段status,某运行阶段累计次数index,以及preStatus决定。此三个变量定义为全局变量,如下所示:
int status = 1;
int preStatus = 1;
int index = 0;
状态之间的切换顺序为:
状态1(LED从小到大依次闪过) ——>
状态2(LED闪烁4次后根据preStatus的值选择进入状态3或状态1) ——>
状态3(LED从大到小依次闪过)
3.3 发送状态编码
3.3.1 初始化UART0
#define UART0_PIN GPIO_PIN_0 | GPIO_PIN_1
void Uart0Init()
{
/* 使能UART外设 */
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
/* 使能GPIOA外设 */
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
/* 配置UART功能脚 */
/* 设置GPIO的A0和A1为UART引脚 */
/* (A0->RXD,A1->TXD) */
GPIOPinTypeUART(GPIO_PORTA_BASE, UART0_PIN);
/* 配置UART 为 9600波特率 8-N-1模式发送数据 */
UARTConfigSet(UART0_BASE, 9600, (UART_CONFIG_WLEN_8 |
UART_CONFIG_STOP_ONE |
UART_CONFIG_PAR_NONE));
}
3.3.2 发送字符串
void UartPuts(const
char *s)
{
while(*s != '\0')
{
UARTCharPut(UART0_BASE, *(s++));
}
}
3.3.3 Timer0A_ISR
void Timer0A_ISR (void)
{
char buffer[8];
unsigned
char bit4;
unsigned
char bit3;
unsigned
char bit2;
unsigned
char bit1;
unsigned
char temp = 0;
/* 清除定时器0中断 */
TimerIntClear(TIMER0_BASE, TIMER_TIMA_TIMEOUT);
switch (status)
{
case 1:
temp = ~(0x01 << index);
index ++;
if(index == 4)
{
preStatus = 1;
status = 2;
index = 0;
}
break;
case 2:
if(index%2)
temp = ~(0x00);
else
temp = ~(0x0f);
index ++;
if(index == 8)
{
if(preStatus == 1)
status = 3;
else
status = 1;
index = 0;
}
break;
case 3:
temp = ~(0x08 >> index);
index ++;
if(index == 4)
{
preStatus = 3;
status = 2;
index = 0;
}
break;
default:
status = 1;
index = 0;
break;
}
GPIOPinWrite(GPIO_PORTA_BASE, LEDs, temp<<2);
/* 取出temp各位,组成位字符串 */
bit4 = ((~temp)&0x08)>>3;
bit3 = ((~temp)&0x04)>>2;
bit2 = ((~temp)&0x02)>>1;
bit1 = ((~temp)&0x01)>>0;
sprintf(buffer, "%d%d%d%d\r\n\0", bit4, bit3, bit2, bit1);
/* 发送位字符串 */
UartPuts(buffer);
/* 使能定时器0 */
TimerEnable(TIMER0_BASE, TIMER_A);
}