opencv2.3读取kinect深度信息和彩色图像
作者:http://blog.csdn.net/moc062066
opencv2.3可以直接读取kinect的深度信息和彩色图像,但是在编译opencv的时候需要注意一点,具体参考这里。
//moc062066
//20111021
//
/*
#include <opencv2/core/core.hpp> // Basic OpenCV structures (cv::Mat, Scalar)
#include <opencv2/highgui/highgui.hpp> // OpenCV window I/O
using namespace cv;
*/
#include <opencv2/opencv.hpp>
using namespace cv;
#include <iostream>
using namespace std ;
static void help() {
cout << "usage:hit any key to quit!" << endl
<< "kinect opening..." << endl ;
}
int main(int argc,char** argv) {
help();
VideoCapture capture(CV_CAP_OPENNI);
if ( !capture.isOpened()) {
cerr << "no device has derected!" << endl ;
return -1;
}
cout << "width" << capture.get( CV_CAP_PROP_FRAME_WIDTH ) << endl
<< "heigth" << capture.get( CV_CAP_PROP_FRAME_HEIGHT ) << endl;
std::string rgb_wnd = "RGB Camera";
std::string depth_wnd = "Depth Camera";
namedWindow( rgb_wnd,CV_WINDOW_AUTOSIZE);
namedWindow( depth_wnd,CV_WINDOW_AUTOSIZE);
for(;;){
Mat depthMap ;
Mat rgbImage ;
capture.grab();
//depthMap XYZ in meters (CV_32FC3),xyz就是获取的点云中每一点的空间位置
capture.retrieve(depthMap,CV_CAP_OPENNI_POINT_CLOUD_MAP);
//color image (CV_8UC3)
capture.retrieve(rgbImage,CV_CAP_OPENNI_BGR_IMAGE);
imshow(rgb_wnd,rgbImage);
imshow(depth_wnd,depthMap);
if ( waitKey(30) >= 0 ) {
break ;
}
}
return 0 ;
}
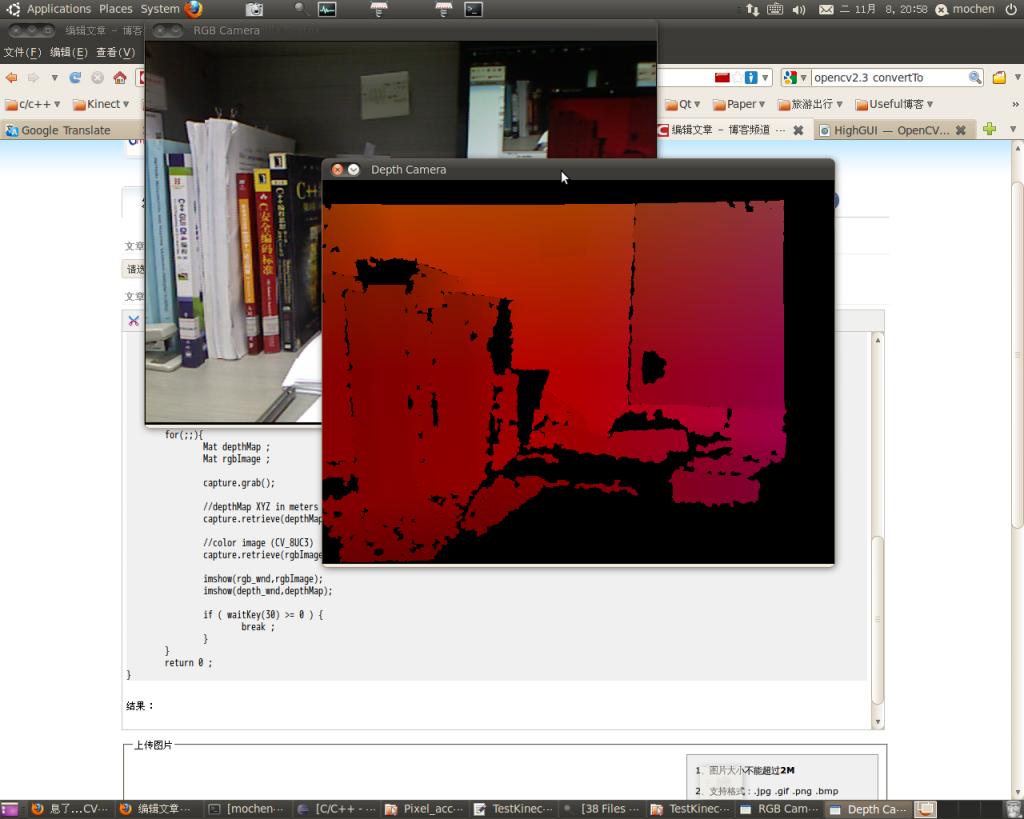
结果: